AndreasKielb
-
Posts
65 -
Joined
-
Last visited
Everything posted by AndreasKielb
-
SL 400 Steadicam Magazines SL-Cine
AndreasKielb replied to AndreasKielb's topic in Steadicam Marketplace - For Sale
Bump, asking 400 USD now... -
Yes, the homebuilt stabilizers site is long gone now but I still use my equipment which I build by the help of this side. Recently we build up a facebook group and uploaded some of the old pictures. Charles, Doug and Cosmin are also there: https://www.facebook.com/homebuiltstabilizergroup/
-
My Heden M28VP stopped working today after my assistant connected an old Aaton power cable, which was part of the kid, instead of the actual FOX analog motor cables. Didn't even notice they had similar connections and that it might be possible to put the 4 pin hirose for power into the motor port. On the Heden site I found out they stopped service for the M28VP in 2016 so I'm a little concerned ( http://heden.se/support/service/ ). Maybe they would repair it anyway but I'll have to wait until monday to find out. Is there another place where I might have it repaired? Meanwhile I had a thought. Maybe there is a safety braker inside the motor which might just gave out due to current on the wrong lines. There was no actual blue smoke or something and also I can't imagine that it's possible to actually kill the internal motor or potentiometer just by wrong electronic connections. The motor would just turn to the opposite direction for reverse polarity, wouldn't it? Possibly destroying the potentiometer mechanically as it hits the end of the 10 turns. But there was no movement at all when he plugged in that cable. It just stopped working. Backup M26P motor still worked with the FOX so it's not the output driver.
-
Which steadicam / gimbal with Ursa mini
AndreasKielb replied to Tiago pimentel's topic in General Discussion
I'm not that familiar with the different ronin versions. From the specs the MX might work as well, wouldn't it? It's also much lighter than the original ronin. -
Which steadicam / gimbal with Ursa mini
AndreasKielb replied to Tiago pimentel's topic in General Discussion
You would need a normal Ronin with that load. I used the combination with the steadicam not long ago and it's actually a great thing. I'll use it more often in future. If you don't need the high to low mode movements you can connect the gimbal directly to your topstage with the cinemilled plate. Once the camera is balanced in the gimbal you can change from handles to steadicam in less than a minute using the quick release so there is really no need to carry the gimbal by hand if not necessary. The steadicam is much better suited for longer takes and eye level. -
Qbranch Qlite problems: solutions?
AndreasKielb replied to Joshua Gitersonke's topic in General Discussion
Yes Alex, that is the problem if you have an Alexmos controller without good support and usable settings and a very wide range of cameras regarding weight and size. But if you have good settings for an Alexa mini, Master primes and remote focus, these settings do normally work with an Epic or Sony F5/F55 with lenses of similar size as well. Having a system with a roll axis only is also generally less difficult to support than a 3 axis system. The Alexmos controller is meant for very different setups and therefore provides a full PID control loop and many other options. It's quite easy to get lost in the software if you have no experience with it and then you end up with a system which doesn't seem to work at all. It's also possible that the system doesn't hold level in pans if the IMU isn't calibrated correctly and the encoders also need to be set up in a specific way. It was of course a huge mistake to offer the Omega lite with big promises and no user support at all. But I think as so many unused systems are around and the chances of Howard stepping in with a valid user support or refunds are minimal, it's worth a try to get those system working within a limited range of equal cameras and lenses at least. -
Qbranch Qlite problems: solutions?
AndreasKielb replied to Joshua Gitersonke's topic in General Discussion
I don't own an Omega Lite but I have good experience in building and tuning Alexmos gimbals. I thought that I might be able to help you out with greating usable settings and also user support later on. I also have sold a few custom build gimbals under the label http://www.portahead.de before the Ronin came out and so I'm used to give support on telephone. Fortunatelly the Alexa Mini and Epic and also Sony F5/F55 cameras are very similar in size and weight and it might be possible to use them with the same settings. Maybe somebody of you is willing to send me a one of the systems which doesn't seem to work to test with for free or very little money. If the others, who want to stick with their system, pay like 300- 500 Euros each for my support to him later, that might get him an acceptable refund of around 3000 Euros in the end. First thing would of course be that I can get one unit to work as it is or maybe with a new board. As you know the boards a very inexpensive so that wouldn't actually change the deal. If I doesn't succeed with getting the unit to work at all, I'll send it back to him so there would be no difference to the situation as it is now. I think it would be unrealistic to be able to use a full size Alexa with the system like it is now, though. Maybe it's possible to fit in a bigger motor instead of the existing one mechnically. Please let me know if my idea is interesting for you. Andreas -
SL 400 Steadicam Magazines SL-Cine
AndreasKielb replied to AndreasKielb's topic in Steadicam Marketplace - For Sale
Pricedrop: Asking 800 USD now. -
I tried the Trinity at the IBC for the first time and have the feeling that the joystick control of the tilt axis was already improved compared to the version of the MagPie promo. At least I think it's possible to maintain a good headroom in a one-shot with that joystick control after a few takes and the chance to learn what is going on. But I do have an issue with the direct connection between sled and pan axis. With a vertical sled the direct connection is of course a good thing but with the low inertia of a horizontal sled in mid mode it's really difficult not to add unintended movements to the pan axis. But I guess the 'around the corner looking function' is an integral part of the rig and is caused by the arrangement of the tilt axis being the outer and roll the inner axis. If it's not a given mechanical fact I'd say it would be better to have the pan axis fixed electronically and not connected to the rotation of the post. Then you'd have the entire inertia of the long post to keep pans perfectly stable in mid mode (...by pointing the rig in the desired direction). But if I'm not mistaken it is a mechanical thing and it would be necessary to reverse the arrangement of tilt and roll completely, having roll as outer axis and tilt inside so that the tilt motors are always level together with the camera.
-
Automated Horizon on a steadicam
AndreasKielb replied to Michael Hauer's topic in Camera Stage/Donkey Box
When I tried the WXB last Cinec the rig was set to zero drop time actually with the WXB providing a kind of virtual bottom heaviness or resistance to sideways tripping. As James already said it achieves that effect by shifting a brass weight in small increments according to feedback it gets from a Wagner IMU. It worked great and I was very impressed by the system. -
I'm selling my analog Bartech remote focus set (transmitter and receiver). It's in nice condition and comes in the original case. Located in Germany / Europe. 1300 USD List of equipment name, model number, quantity, serial number: - 1x Bartech handheld units S/N: T1.0550 - 1x Bartech receiver S/N: R1.0550 - 1x motor cable - 3x marking strips




-
WTB Arri 35-3 Steadicam Mags
AndreasKielb replied to Joe Gill's topic in Steadicam Marketplace - Wanted
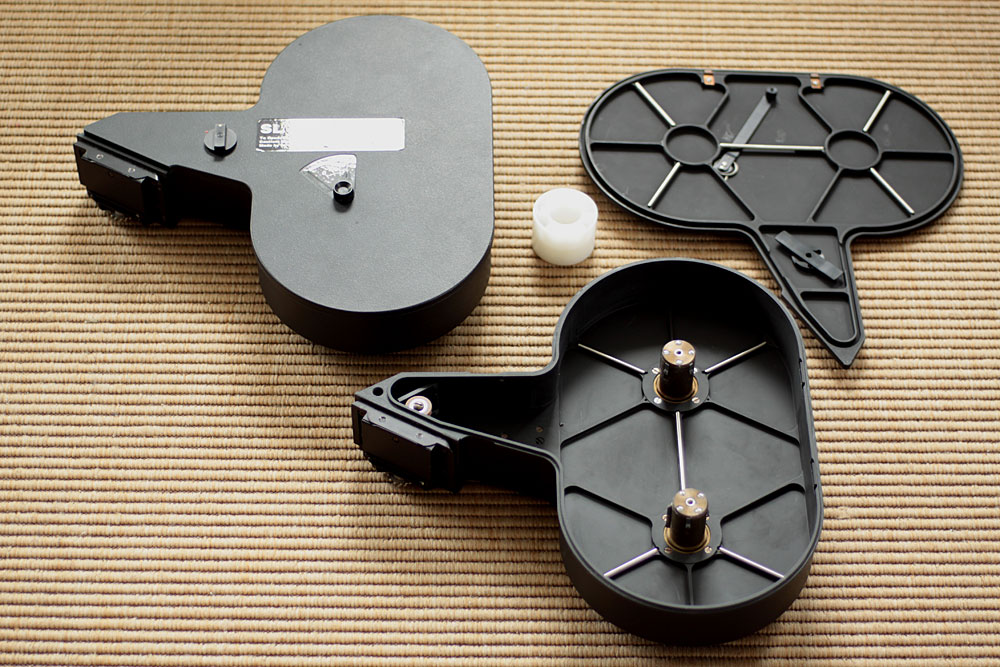
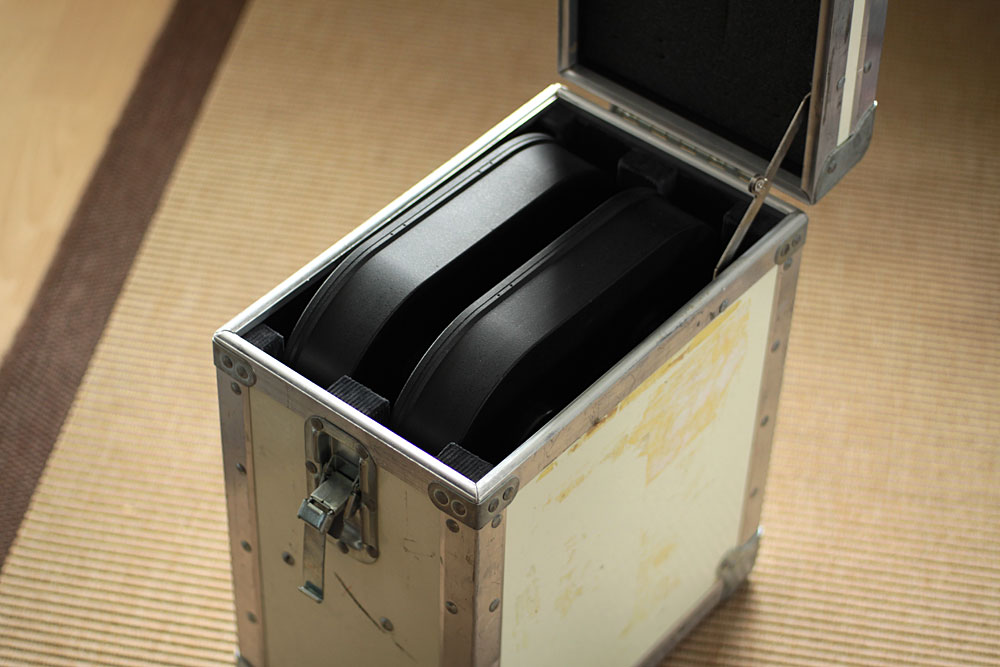
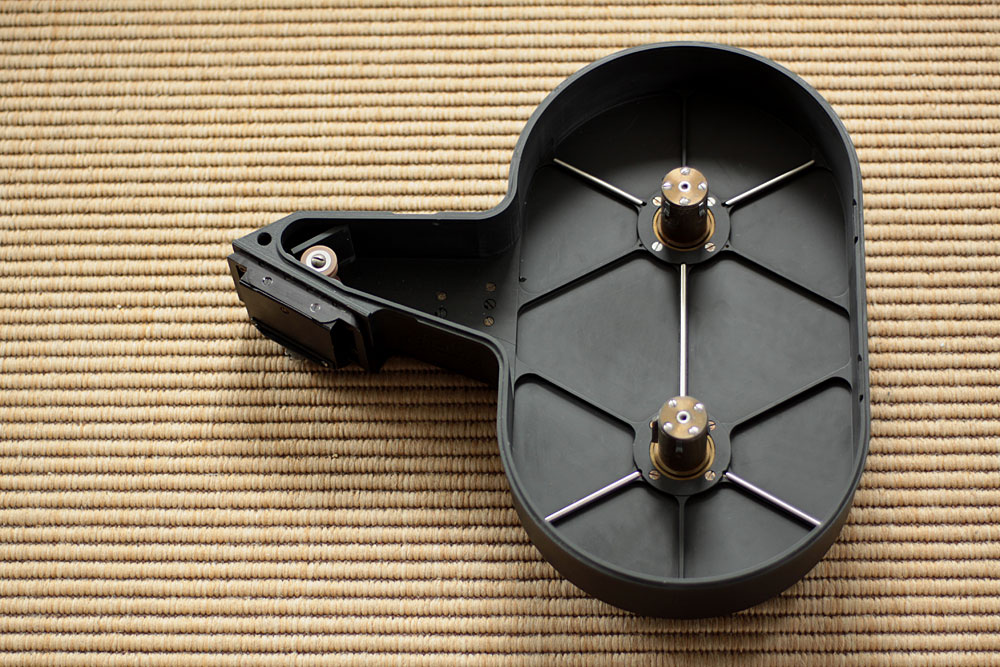
Hi, I've two SL-Cine steadicam mags for sale which are designed for the Arri 35-3 but lighter and in excellent condition. They come with a custom case (see attached pictures): http://www.steadicamforum.com/index.php?showtopic=21912 -
Selling a case of two SL 400 steadicam mags in excellent condition. I'm asking $950 USD. http://www.slcine.com/html/stead2.html These magazines will work with the Arriflex 35- 3, Arri 2C, SL-Cine 35 mm and also Arri 435 and Arri 235. On the Arri 435 and 235, the mags sit on a slight downward angle but still without shifting the balance considerably as standard mags would. They are made of a magnesium material, making them very very light, lighter than 435 Steadicam mags. A footage counter is built into the cover. Weight: 56 oz (1.5 kg) New price for the mags is $4250 USD each. They will run up to 130fps in forward only. The magazines are located in Germany. email: andreaskielb@web.de





-
Portahead 10 brushless gimbal with Arri Alexa on steadicam
AndreasKielb replied to AndreasKielb's topic in General Discussion
The rig length is only because I heave fairly light weights at the bottom of my sled. It's actually the same conventional with heavy cameras up to 15 kg and if there is a bridge plate under the camera which increases the distance to the topstage. But having a long post doesn't bother me actually. I need to limit the overall rig weight to 23 or 24 kg as that's the weight limit of my arm. At the moment my attempts are mainly to explore the possibilities of this new technology in combination with the steadicam and to get a rig which allows dolly-like shots under all circumstances. It's just to add an extra bit of perfection. If you are interested I already wrote a little technical description about why I think that improvements are possible with the combination of brushless gimbals and steadicam which go beyond using both systems on their own: http://www.steadicamforum.com/index.php?showtopic=21005&p=103777 A more integrated system which allows low to high mode shots on steadicam for heavier cameras is also in the planning but will require CNC machining and probably a cooperation partner. I already built a system for lighter cameras and with available parts, though: -
Portahead 10 brushless gimbal with Arri Alexa on steadicam
AndreasKielb replied to AndreasKielb's topic in General Discussion
It might seem odd to put additional weight on the steadicam which already does a great job in stabilization. But at the moment there are a lot of shots that usually don't utilize a steadicam and the reason is often explained with a gesture that insinuates a slight sway, like for instance a pack shot for a commercial. I won't suggest auto-levelling is a game changer but it might be a helpfull tool anyway. -
Portahead 10 brushless gimbal with Arri Alexa on steadicam
AndreasKielb replied to AndreasKielb's topic in General Discussion
Hello Frank, the steadicam operator also controls the head with the same movements as with conventional steadicam. The tilt is set to a really tight follow mode and is following the movement of the sled very closely, as the operator tilts the sled up or down. It feels like normal steadicam operating and the tilt also reacts precisely to slight headroom changes. It's common praxis with the steadicam to compensate fast changes of the subject with a boom up or down with the arm rather than a tilt, like if an actor is taking his first step down on a flight of stairs. It would still be necessary to do compensate such movements with an height change of the arm rather than tilting but I never felt that I was too late with framing even though the head reacts milliseconds slower than with a direct mechanical connection between sled and camera. I only had a few chances to test the system, though. This pictures are from a shooting with Epic, Leica lenses and accessories like SDI splitter, hotswap and larger battery. As I was afraid the scedule with the kids was very tight and I had no time to do additional test with the camera. Also the white background was not really a challenge for the system as there were no straight lines. But I did some fast pushs into close ups as you can tell from the unusual body position in the second picture. I think it was taken while braking after such a push in. They looked good but I will try to make better example footage before I edit another video to show the advantages of the rig, as I know the ballet scenes were not very challenging either. I thought about fast push ins, direction changes with the rig facing sideways, very wide angle scenes with a lot of straight lines but also shots with long lenses. -
Porta Head 5 brushless gimbal on steadicam
AndreasKielb replied to AndreasKielb's topic in General Discussion
Hey Frank, wie geht's? Funny to talk in english to you on a forum :). Didn't know about the Movi and it's ability to have pan operated in majestic mode while the tilt is fixed and remote only. In that case 'Smooth Lock' would be my favourite way of operating with the Movi. I consider pan control by the operator as very important in combination with a jib style connection of a gimbal to a steadicam. Of course I know Larry McConkey's application of his Movi on the steadicam. He was the first who had the idea about the 45 degree bracket when I was still thinking about how to accomplish the jib move over the front without getting the rear tubes into the frame. Hello Marc, the setup is quite lightweight as it's an aluminum bracket and only the weight of the gimbal and the camera. I think it was under 8 kg with the blackmagic. It should work with Epic/Scarlet but I didn't tested it in that configuration, yet. I think it will be a good combination with Epic/Scarlet as they are short enough to not get in conflict with the turnaround boom. I plan to test it as soon as possible and will try to place the touchscreen monitor directly behind the camera, connected to the dovetail. The follow mode for pan works by turning the post, which is exactly as you would expect it for straight high or low mode. As the sled is horizontal it also works by turning the post itself and not by pointing the camera into direction. This needs a little time to get used to, you turn the post in order to pan and then follow your own pan by pointing the sled, so to say. The three monitor positions would be behind the topstage or connected to the bracket pointing up for low mode, the normal steadicam monitor for high mode and directly behind the camera for horizontal sled positions. This way the monitor angle is kept horizontal together with the camera as it's naturaly the case with the blackmagics. Still need to build one system for myself to make further tests as the rig in the video is now in Bucarest at the movie Lorenzo Senatore is currently working on. Thanks, Andreas -
Portahead 10 brushless gimbal with Arri Alexa on steadicam
AndreasKielb replied to AndreasKielb's topic in General Discussion
Another possiple application with the Portahead 10 would be pack shots like in the showroom chapter of the Porsche footage. In this special case it was necessary to do it with the dolly because there were a lot of breaks inbetween the move to show the different features (lights on and off, back door open...), DP and assistent had to stay on the dolly calmly for the entire morning. But we had to use curved and liniar tracks in combination as the curved tracks alone have a radius which is too small to set it up around a car. Thats why there was a lot of post stabilization necessary to compensate the nonuniform flow. If the shot were just a half circle without the technical stops, the shot would have been even easier and smoother with a system like the Portahead 10 in combination with the steadicam. -
Portahead 10 brushless gimbal with Arri Alexa on steadicam
AndreasKielb replied to AndreasKielb's topic in General Discussion
The steadicam operator also controls the head with the same movements as with conventional steadicam. The pan axis is directly connected to the sled and therefore operated completely manual. The tilt is set to a really tight follow mode and is following the movement of the sled very closely, as the operator tilts the sled up or down. It feels like normal steadicam operating and the tilt also reacts precisely to slight headroom changes. It's common praxis with the steadicam to compensate fast changes of the subject with a boom up or down with the arm rather than a tilt, like if an actor is taking his first step down on a flight of stairs. It would still be necessary to do compensate such movements with an height change of the arm rather than tilting but I never felt that I was too late with framing even though the head reacts milliseconds slower than with a direct mechanical connection between sled and camera. It's even important technically that the steadicam operator controls tilt on it's own because the space under the camera is limited and with a remote operator not paying attention the risk of getting in touch with the topstage accidently would be too high. The system can tilt 90 degree up and down and those movements would be impossible to synchronize with a remote operator. Therefore it's solo operating only if the head is connected to the sled. If the head is extended with the optional pan motor to build a standalone 3-axis head, the systems settings can be changed without connecting a laptop by clicking the menue button twice. This preadjusted profile is set to wireless remote control and also controls the additional pan motor. As you can imagine from the heads dimensions, tilting 90 degrees down will be impossible in that configuration, only the the tilt of the steadicam sled together with the whole head opens the necessary space for the camera to tilt 90 degrees. But I see it as a benefit for car-to-car shots regardless, that the 3-axis version can be strapped to a frame by bungee cords without the necessity that somebody actualy holds the head at higher speeds. This simple rigging solution opens a new field of applications with the portahead 10 and Alexa, which needed a shotmaker and stabilized head before. I already did a number of car-to-car shots in the last year with the smaller Portahead 5 and cameras like the Red Epic. These are two examples: http://www.porsche.com/microsite/cayenne/usa/welcome/default.aspx#/intro For the Porsche footage we also did the aerials with the rc helicopter of the DP and a small brushless gimbal adjusted by me and with the blackmagic pocket. The car-to-car shots are in the chapters 3 and 4. For the other clip I only did the car-to-car scenes while the aerials were shot by another company. http://www.portahead.de -
Portahead 10 brushless gimbal with Arri Alexa on steadicam
AndreasKielb replied to AndreasKielb's topic in General Discussion
I was the operator in the video. The weight of the camera and the head together were about 14 kg, I think. My arm handles about 23 kg with that springs and it was not completely at it's max which is about 15 kg camera weight. I know that those scenes can be considered as easy and every operator is estimated to do them without any problem. But the shots were already planned with normal steadicam and I was asked to do them longer before. Then we were talking about my electronic stabilizers and the idea came up to finish the almost complete prototype during the week and to make a first test on Friday. That test went well and we decided to go for it for the actual scenes. There was never the idea to change the already planned shot designs only for this test. For me it was a great chance to actually try the system with the Alexa for the first time and I'm just happy that everything worked well so far. There will be another project next week and also I hope to be able to use the system during an upcoming feature where I'll probably work as b-cam and steadicam op. With a little luck there might be shots that show off the potential better, otherwise I'll need to pull off a shooting on my own, later. Both axis, roll and tilt are stabilized and the antler like length of the setup creates much inertia to bring the manual pan axis to a higher precision level as well. I think at least the lock off in the beginning is a little more locked as usual, but that might just be my own wishful thinking. -
Portahead 10 brushless gimbal with Arri Alexa on steadicam
AndreasKielb replied to AndreasKielb's topic in General Discussion
There are a lot of reasons. For me auto-leveling is not only to make moves like with the AR and from low to high mode. It's more to bring an extra level of perfection where it is needed and even if it's not. There are shots where a sway in horizon is absolutely disturbing, like for instance a packshot for a commercial or a tracking shot through an empty hall at super wide angle. Other shots are more forgiving like if there is a lot of movement in the picture. But I think if the technology is there, there is no reason to make compromises. Often the reason for an error is not even apparent in the picture, like a difficult terrain, but most errors are just disturbing. Why not use a technology that makes every steadicam shot look like a dolly shot? Current sensor technology has a precision unreachable even for the jedi master of steadicam. The possible angular resolution of the mainly used Invensense MPU 6050 is 0.06 degrees dynamic and 0.02 degrees static ( http://www.basecamelectronics.com/downloads/32bit/ ) and is almost in a range of the fibre optical gyros. For comparrison the new digital level displays are set to 0.6 degrees or 0.3 degrees although technically much higher resolutions might be possible ( http://www.steadicam.com/steadicam_wagner_horizon_whm.html ). But at those highest resolutions even the slightest gimbal handgrip would cause the level display to go crazy and unreadable. On the other hand the combination of steadicam and brushless technology creates an effect well known from Cineflex or the Stab C head. Those expensive systems utilize an outer axis which does a pre-stabilization like a normal 3-axis head but then 2 or sometimes 3 axis are stabilized once more in order to create a high sensitive inner axis system. That's why those systems are called 5-axis or even 6-axis stabilized heads. The combination of steadicam and gimbal could also be considered a multi-axis system. The steadicam already creates a very stable picture with an angular precision of maybe between 0.3 and 0.8 degrees, if fast starts and stops are taken into account but are compensated by hand from an experienced operator. Of course way better than with a handheld gimbal. This supports the high sensitive inner axis (gimbal) in an excellent way. It doesn't need to try to correct large errors and shows therefore much better results than a handheld 3-axis gimbal could do (less micro-vibrations). Actually a win-win situation for both systems and the operator.- 24 replies
-
- 1
-

-
- brushless gimbal
- alexa
- (and 2 more)
-
First application of the Portahead 10 prototype for a short film. The system is designed to be used with a steadicam system as portable device and adds electronically stabilized roll and tilt while the pan acts manually with the steadicam. The weight of the 2-axis head is 3.6 kg and it is optimized for longer cameras at around 10 kg like the Arri Alexa series or Amira, Red one, Sony P1 or F55 with raw recorder. Shorter and lighter cameras can also be used as the motor output settings can be adjusted. Later there will also be an additional pan-motor in order to extend the system to a 3-axis stabilized head for crane, cablecam or car-to-car shots. www.portahead.de
-
Porta Head 5 brushless gimbal on steadicam
AndreasKielb replied to AndreasKielb's topic in General Discussion
Unfortunatelly I didn't have time to continue my work on the steadicam connected gimbal yet but some footage we shot with the Red Epic and the Porta Head 5 for Porsche is online in the meantime: http://www.porsche.com/microsite/cayenne/usa/welcome/default.aspx#/intro There are a lot of car-to-car driving shots in the intro and also in the chapters 3 (off-road track) and 4 (on-road cirquit). The on-road cirquit is a race track which belongs to the Porsche facility in Leipzig/Germany. Here we used the Porta Head connected to a jib-arm from a pick-up camera car. For the off-road track we used the system from inside of another Cayenne supported by bungee cords. For the aerial shots we used a rc helicopter together with a smaller brushless gimbal and the blackmagic pocket camera. I also did adjust the pid settings of that gimbal according to our tests ahead of the shooting. I'll offer this gimbal for aerial shots soon as Porta Head 1 system. Best regards, Andreas www.portahead.de -
Porta Head 5 brushless gimbal on steadicam
AndreasKielb replied to AndreasKielb's topic in General Discussion
Here is a new music video made with our Porta Head 5 systems that shows very well what I have in mind about putting a 3-axis gimbal on a steadicam. Surprisingly it was done handheld but Christian, who also works with me in optimizing those systems, did a great job with hiding his own footsteps. The result is a kind of "out of this world" aesthetic like the moves towards the bathtub in the clip. I think such a look can be best achieved with a system that stabilizes all axes as all moves can be like drawn at a line. The clip was operated as single user with follow mode. I also edited some tests I did two months ago in a skatepark. Some of the scenes where shot walking handheld with the system and others while running behind the skaters. Like the clip above every shot was operated as single user with follow mode. As far I understood from the specs and manuals of the MoVi and the upcoming DJI Ronin follow mode in combination with low to high mode on a steadicam will only be possible with alexmos based systems at the moment. That is because the alexmos software allows to enable follow mode separately for tilt and pan while MoVi and Ronin only allow to select between two operator mode and majestic in general. Later I plan to offer the system in combination with the steadicam rollover bracket, if somebody is interested. Probably this offer will be combined with a 2 days introduction visit to go through the setup and also in order to tune the system to the camera and remote focus configuration which is going to be used. Best regards, Andreas www.portahead.de -
Porta Head 5 brushless gimbal on steadicam
AndreasKielb replied to AndreasKielb's topic in General Discussion
I should mention that the "majestic" lag doesn't necessarily have to be as high as in the video. Later that day with Lorenzo we tried a follow mode window of 0.6 degrees and also a smaller expo so that the pan follows the turn of the post instantly. Expo is a logarithmic curve in the alexmos software that slows down the movement in the beginning but makes it faster with higher a deflection of the handles (... or the steadicam post). That felt very intuitive and allowed a direct control of the pan for framing. It is possible to choose between full remote control by a second operator or follow mode for pan. Follow mode is often better to allow a good timing between tracking movement and pan. I'll post more videos of the systems reaction and of course actual footage from the camera in a few weeks after I built another system of that kind.