Chris Poynton
-
Posts
42 -
Joined
-
Last visited
-
Days Won
1
Everything posted by Chris Poynton
-
Can anyone post a picture of their rig in co-planar setup? (Or refer to existing pictures?) Curious as to what percentage of ops might use "co-planar" setup (for ease in maintaining DB) v. the need for higher off-set monitor position (for greater visibility of monitor).
-

First Merlin 2 Test - Critique please
Chris Poynton replied to Scott Donnelly's topic in Steadi-Newbies
Run a test with a real object of focus, preferably an actor. You will then be able to critique your own accuracy of framing. I sensed with the car shot you were more thinking about your feet rather than feeling through the lens as to what geometric shapes were moving through your frame. You need to get to a point where you can rotate around an actor and gently push the audience's attention around inside the "rule of thirds", on a slight telephoto. -
Need help balancing my Laing M-02 stabilizer
Chris Poynton replied to Ana Melendez's topic in Steadi-Newbies
Quaid can you provide some detail on the problems? -
Need help balancing my Laing M-02 stabilizer
Chris Poynton replied to Ana Melendez's topic in Steadi-Newbies
Thanks Charles. Can you expand at all on the following? -
Arms that "bottom out" - Operator Preferences
Chris Poynton replied to Jamie Northrup's topic in Arms
So far I have not heard anyone say that arm performance data "does not exist" (e.g. somewhere in personal or company archives), but rather that data couldn't be particularly relied upon for purchasing decisions, or that people just dislike the idea of data. If official graphs or tables are not available, then it would be good to have a common shorthand for describing the force curve. (e.g. Type X arm with load of 40 lbs and float point set to zero degrees requires 1.2 to 2.5 pounds to boom from +3 inches to +25 inches, with a stiffening from 2.5 to 4 pounds over the final 3 inches) Yes it would certainly need to get more "dimensional" to paint a true overall performance picture for an arm (by consideration of min/max/key loads, spring combinations, "ride" settings if applicable, internal friction, etc.). All very doable in simple tables or graphs and no harder to interpret than depth of field data. Who has the time or interest to assemble or absorb such data? From the track record and contributions so far, obviously very few. But the geeks are out there, and an "Arm Performance Primer" is not that hard to envisage ... and could be a useful resource for the community, even if it is not fully exhaustive for available models. -
Arms that "bottom out" - Operator Preferences
Chris Poynton replied to Jamie Northrup's topic in Arms
A PRO arm curve could be sketched against Tiffen Gx/Masters arms (by anyone who has operated them) so as to put all this on paper so we are speaking the same language. (I have not flown either). Those curves would illustrate the practical difference between progressive/digressive and iso/non-iso performance and perhaps partly resolve the original question of this thread. If established operators are happy with their arms, that is fantastic. They may have no need/interest to talk about data. Good luck. But there are plenty of aspiring ops who are not in that position. The starting point for my attempts to draw "lift performance curves" is that no such data is released by manufacturers, so there is no industry standard or conventions for presentation. Even basic definitions of iso-elasticity are squabbled over endlessly on forums, even by the highest end professionals (to wit Eric's link). Even strict patent definitions leave plenty of room for discussion. Entry-level users are not in a position to road-test numerous arms, unless they are very well connected and happen to live in major production centers. "Feel" of arms is a subjective preference. The challenge for new purchasers is to efficiently compare "apples with apples" and make purchasing choices based on cost/benefit analysis of features and performance. To answer a couple of Eric's points ... I have flown large rigs, but only at a workshop many moons ago and my muscle memory recall is not very precise. I have recently done more extensive data testing on a Flyer, as well as various low-end Chinese arms. I have put together my webpage in a serious effort to assist other aspiring prosumers in a similar position to myself who wish to compare performance parameters of low-end brands against industry leading brands. (e.g. when various people on forums buy new Laing or Proline or L'Aigle systems for a few grand, how can we test the arms using a precise methodology, share data and then compare performance against the known "industry standard" mid/high-end arms). As noted on my website, I have asked for corrections and contributions wherever possible ... it is a work in progressive and a learning curve in itself, tackled cautiously. Lift/force is one aspect of the arm's performance/feel, and I appreciate that there are other crucial factors such as internal friction (e.g. as per the "toe test") ... but again there is a dearth of available data or clear conclusions from the field for various models that we can access at present. -
Arms that "bottom out" - Operator Preferences
Chris Poynton replied to Jamie Northrup's topic in Arms
On the "draft of iso-elasticity curves" diagram, all the lift values are shown as "positive" merely to compress the space required for the display of data. (i.e. pushing the arm down below the float point requires "negative lift" of x pounds, but is shown as a positive value.) I will make a note on the digram if/when I update it. Sorry for any confusion. -
Arms that "bottom out" - Operator Preferences
Chris Poynton replied to Jamie Northrup's topic in Arms
I would love to see Lift Performance Curves from the major manufacturers so that new purchasers in particular can compare "apples with apples" for various arms. Curves would show whether the arm is progressive/buffered at the extremes, iso-elastic characteristics under a wide range of loads, and common expectations for how many pounds/kg of lift should be required with various arm settings. If anyone has any such formal data or graphs, even from ancient dusty archives, I am way keen to absorb this, so please post or PM. I have been giving a lot of thought as to what a user friendly, industry standard format for lift curves might look like. My mock-ups of "iso v non-iso" curves, as well as proposed basic test methodology for lift performance is at: www.cp.org.au/movies/steadicam-test.html#lift_curves ... (That steadicam testing page was put together to help new purchasers wade through some of the lingo and pitfalls of low-end systems, but the lift performance stuff may be relevant to higher-end systems, due to the gaping absence of this data in the marketplace). -
How about a custom Steadicam level app? Clinometer seems set apart from the bar level apps I've seen. Acceleration doesn't seem to affect it. Sliding at high speed across a table or shaking back and forward makes barely a hair's difference. How about if Clinometer was re-packaged to generate a bar level at the very top or bottom of the iPhone screen. Then butt the device up against the bottom edge of the monitor image. The sensitivity of the bar level could be tweaked mathematically for preferred responsiveness. The extra real estate on the bottom portion of the iPhone could be used for other info such as a log of tilt errors during the shot, perhaps linking in with timecode, displaying video feed from another camera, countdown to wrap time, etc, etc. Alternatively, a data signal from the iPhone level (discretely mounted elsewhere on the rig) could be fed by bluetooth or dongle to a data input on the monitor for a more conventional bar level embedded in the image. (I have no idea if any Steadicam monitors currently have non-video data inputs at all - maybe USB for software upgrades? - but perhaps firmware of the monitor can be tweaked to incorporate iPhone feed if that option exists). If a "Steadicam Level App" is of any interest, we could put together a wishlist for the Clinometer developers (... or possibly for Per Holmes of Hollywood Camera Work who developed Shot Designer for pocket blocking and is was recently beta testing a new timecode app with working tilte Cam Synch that can synch up to 254 devices and optimise for post-production workflow).
-
The iPhone level seems impervious to accelleration and may be a useful add-on for someone? The app "Clinometer" gives a bullseye level with 0.1 degree accuracy for flat surfaces and a rolling bar level with degrees when placed on its edge. There may be other level apps providing ultra simple bar levels.
-
Is anyone taking on the task of writing up a "sticky" or "automatic introduction" for the Newbie section to explain protocols and purpose of this forum? Perhaps there could be a flag that pops up when someone attempts to make their first post, pointing them to an intro page, and maybe a cooling off period of 48 hours or something after registration before they can post. There is recurrent discussion about how to deal with amateur/prosumer enquiries on this forum (often regarding cheap rigs or feedback on footage). Some forum members have an editorial perspective that the original purpose of the "Newbie" section was for those who are already working in the industry and generally up to speed with Steadicam basics, but only just getting started with buying/operating their own Steadicam gear. The Newbie category has by default defined itself as a first point of contact for amateurs/prosumers, and perhaps the "higher end" newbies just tend to make their posts in the relevant technical sections. There is a great set of FAQ's and introductory stuff at homebuiltstabilizers.com which could be referred to in the sticky, and is a great resource for steadicam enthusiasts/prosumers.
-
The Gorelink page from Walter Klassen: http://www.walterklassen.com/home-page/equipment-2/handheld/gore-link/ Constantly amazed at how diverse and creative you guys have been over the years ... Movi will fit in well with this, no doubt.
-
Love the detail of the response Chris. Many thanks!! It would be great at some stage to see some official PR materials (e.g. in the Tiffen product PDF?) that might show some diagrams of the Exovest interaction with the body (i.e. the leverage structure / body loading points compared to a conventional vest). It would help sell the benefits of the concept quickly and graphically, especially for those who don't know the medical lingo. Thanks again.
-
I am wondering whether the configuration of the thigh pads on the Exovest is something that could be retro-fitted to conventional front mounted vests. It seems that the Exovest pads place the "frontal pushing forces" from the vest under load directly onto the illiac crest at the top of the hips rather than broadly across the abdomen. Would this not be a benefit for all vests? I am in the early days of my use of conventional vests and perhaps I have not hit on the correct fitting method, but I find I am susceptible to the tingling down the front of my legs which Chris Fawcett sent me a stark warning about .... "The tingling sensation you describe is meralgia paraesthetica, and comes about when the inguinal ligament traps the lateral femoral cutaneous nerve underneath it. It's a common complaint of Steadicam operators and fashion victims. Yes, tight jeans can bring it on too. The vest must have been too low or too hard at the waist, or just badly made. By the way, that tingling seamlessly transitions into permanent nerve damage, so it's best avoided." Is there a demonstrable reduction in the meralgia tingling with the use of the Exovest? I have begun improvising some extra "Exovest-style padding" for the iliac crest inside the front of a conventional vest but again haven't hit on the right combo of position/hardness to reduce the meralgia tingling, although the pressure on the abdomen is greatly reduced. I am thinking on a cautionary note that perhaps directing the frontal pushing forces onto the illiac crest in a conventional vest with DIY or retro-fitted padding may even increase the potential for meralgia tingling because the majority of the downward force is directed onto the front of the hips, unlike the Exovest which I understand perhaps "halves" the frontal pushing forces due to its rear vertical bracing and direction of load onto the rear of the hips. I hope this post can clarify some advantages of the Exovest and maybe encourage some of the principles to be adopted elsewhere for our ongoing health. Picture below shows the tendon and nerve involved in MERALGIA PARAESTHETICA, taken from an article from the Mayo Clinic at http://www.mayoclinic.com/health/medical/IM02494
-
I like the "out of the box" spirit of the enquiry Janice, grappling with some sort of not-quite-known frontier. Just wondering if you can describe the parameters of the light-weight rigs you are thinking of? Are you talking specifically of say a Pilot with a DSLR? What camera weight and total sled weight are you referring to? Would be helpful to clarify the niche. Three angles that come to mind. 1) The CMR Blackbird stabiliser has a variable friction universal joint if you wanted to experiment with the feel of that. It has the "Merlin curse" of basically no real-estate for one's operating fingers to operate on, so it is a bit if a dead-end in terms of rig geometry, but it will allow you to experiment with variable friction without gumming up a higher-value gimbal. It also uses an antler arrangement on the lower spar. 2) The use of multiple pairs of micro-antlers (on a Pilot for instance) is a possibility, sitting maybe 4 inches from the optical axis at both the front and rear of the camera and also at the front and rear of the sled base. This will only slightly increase the required operating distance from the body in some positions, but may have an interesting multiplier effect. 3) Also I have been experimenting with kooky hand positions that are counter to years of practice but emerged naturally when I recently tried a 5kg sled on a cheap chinese system with a sticky pan bearing and a poky annoying gimbal sleeve. My jury is still out but I think there may be something useful in it, especially for windy conditions. Position as follows; With the post hand I tried placing the thumb on the top of the gimbal handle so that the mass of the hand is not having to "chase the post" and will therefore not jiggle the post. Meanwhile I have my fore finger on the post above the gimbal and ring finger below the gimbal, separated by about three inches, (not touching the gimbal) while maintaining the thumb on the gimbal handle.This combination opens up slightly kooky opportunities to add manual dampening to the various axes of the gimbal as required, especially for lock-offs. (which may give more flexibility than an oil change!). I am finding that manually tilting the gimbal yolk with the boom hand makes radical tilts kind of fun and easy, especailly for lock-offs, as long as the gimbal handle is at correct 90 degree orientation to camera axis. Not sure if any of that is relevant to your quest Janice, but thought I would just articulate a bit of the learning curve I am on too :)
-
Chinese Knock off steadicam's are starting to piss me off
Chris Poynton replied to Adam Eden's topic in General Discussion
Perhaps a protocol can be suggested on RedUser (or a pinned thread in this forum) for newbie owners of low-budget stabilisers to be mindful when discussing their services ... Does one list "Steadicam Operator" on their business card or "camera stabiliser owner - Red compatible"? When pushed it could expand into "I am starting out as a steadicam operator and I own a low-budget rig" which sort of covers the bases and raises a few humble flags for further discussion with an intelligent hirer. It is always a case of "hirer beware". Worth raising with the purchasers on RedUser, if they wish to lay good groundwork for co-operation with professional operator colleagues down the track. The reality is that "steadicam" is used widely and loosely as a generic cross-brand term for arm/vest stabilisers . I have never seen a feature credit reading "GPI-PRO / XCS Operator". And strictly speaking, even a Merlin owner can call themselves a "Steadicam operator". Ouch? -
Chinese Knock off steadicam's are starting to piss me off
Chris Poynton replied to Adam Eden's topic in General Discussion
It seems some of the people on the RedUser forum are now leaning away from buying the Chinese Steadicam systems and towards a more high-tech solution ... from Peter Jackson ... known as the "Cheap as Chups" Steadicam, as used on Bad Taste (1987). It seems no-one who uses these cheap rigs gets anywhere in this biz ... [thanks to Brett Harrison of Mebourne for digging up this timely reminder!] -
Just putting it out there ... it would be great to see some more videos of recommended exercises (perhaps even ops actually doing them :o and explaining their particular benefits). Could be broken down into different sets (e.g. morning general wake-up ... on-set initial limbering ... particular release exercises during day ... warm down sequence). This forum is overflowing with info on gear, but not so much on our most important piece of gear ... what St Francis referred to jokingly as "Brother Donkey". I have been very interested in yoga for many years and would love to follow up this line of enquiry.
-
Chinese Knock off steadicam's are starting to piss me off
Chris Poynton replied to Adam Eden's topic in General Discussion
This is the reality of market forces ... an ***entry level*** (term used advisedly!) sled for DSLR users and the serious enthusiast that will likely provide better results than a handheld Merlin and maybe about 1/3 performance of a Flyer. The load ratings are extremely debatable. There is a serious and obvious lack of demonstration footage from these rigs on the web, so any uptake will likely be slow. However, this is an onslaught of technology that will not go away in a hurry, and there will be iterations and DIY tweaks that will improve the performance of these rigs and likely affect the economics of low-end Steadicam operators. The underlying problem for the sellers and users of real Steadicam equipment is that superior performance criteria of Steadicam gear (e.g. iso-elasticity, bearing quality, inertia feel) are generally not available in empirical form. For instance, when was the last time anyone saw empirical force/curve data graphs for various Steadicam arms? Or inertia measurements that allow you to clearly compare operating a 4kg Merlin v an 8kg Flyer v a 20kg GPI-PRO? The subtleties of iso performance, for instance, are quite impenetrable to most newbies, so many more will continue to be sucked into the lazy school of thought that says "if it bounces it must behave like a Steadicam". These systems are just another step in sorting out aspiring operators ... a chance to play and work out whether they want to take the next investment step. Regarding actual performance of these Chinese arm/vest/sled systems, early user feedback on other forums (for a similarly badged system) indicates the bearings in the sled may be reasonable and that dynamic balance is achievable. The tilt head rotates around the top of the post, not the CG of an average camera, so trimming the headroom will affect both static and dynamic balance, making trimming for headroom maybe a three-plus-step process. Internal cabling on one such system is HDMI. The monitor bracket is somewhat of an aberration, but can be easily tweaked or replaced by a DIY-er. Ditto the curved operating handle. The performance of the Chinese arms generally depends greatly on a great deal of swapping and experimenting with various springs. I have been experimenting with one such in recent weeks, and I conclude that very limited ***almost iso-elastic performance*** might be theoretically achievable in very narrow weight ranges, but from my observation, the geometry tends towards a very non-iso feel. The "lift adjustment" knobs require an enormous number of turns for little net effect in the lifting, so trimming for various lens heights is not really an option. There is some software floating around on the HBS Forum at HomeBuiltStabilizers.com that allows load/performance modelling of various arms if anyone wants to toss around arm parameters. (The software is "SteadicamDesigner v1.0" (2007) by Lyu Abe.) The Chinese vest design (common to many brandings) is generally quite solid in its adjustability, with padding and buckles that are servicable. Although ironically - given its Chinese origins - the vest cannot be readily adjusted to very slim builds. The socket blocks are sophisticated, offering dual axis adjustement for fall of the sled, but the mechanism and large hinges at the arm's shoulder tend to take up an enormous amount of real estate - up to 10-15cm of extra room off the hip than say a Flyer. (Ouch for doorways.) All in all, these rigs are not to be dismissed, although I am sure these developments must truly irk anyone who has spent more on a battery than what these full rigs sell for. I would encourage some renewed efforts by manufacturers of high-performance Steadicam gear to put greater effort into releasing empirical performance data, and/or putting together a new web site called something like "SteadicamQuality" that neatly encapsulates all the reasons one might want to steer clear of imitations at the pro-sumer end of the market, so that there is an easy "go to" that can be promoted on the various forums where this gear is discussed. Hilarious!!!!!!!! -
Even though this is from a while ago Charles, can you provide some description?
-
Find aquisition & workflow info for films at ShotOnWhat.com
Chris Poynton replied to Chris Poynton's topic in Off Topic
Thanks Eric ... I had in my mind that there was a much larger difference between "2k cinema standard" and 1080p (when it's really lineball) ... and that perhaps an enormous amount of the Alexa image quality on Hugo was being thrown away. (Ironically that database doesn't specify the Alexa model or aquisition resolution so maybe it's not incredibly helpful in this instance). When checking some figures on theatre resolution in general, I also came across an unsourced observation that, when viewed at 1.5 x the screen width, people can only discern about 1 million pixels or roughly 720p. All in all, it makes me feel a tad better about only owning a hacked GH2 ... -_- -
Very interesting database that provides full breakdown of workflow for listed feature films including : Aquisition format ... film stock ... cameras ... lenses ... print ... distribution ... VFX ... editing, etc. See: www.ShotOnWhat.com Example listing for Hugo (2011) ... distributed in 1920 x 1080!!!
-
Great timing Tom! Thanks! Also there is a design from Louis Puli for aluminium tubing in a "wind killer" thread at: http://www.steadicamforum.com/index.php?showtopic=12019
-
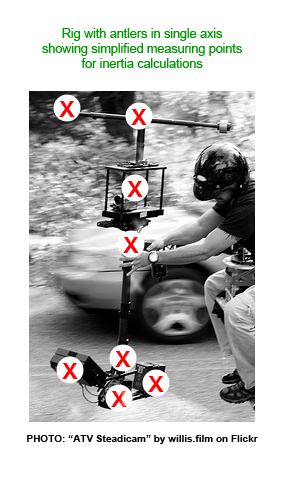
The handbook section on antlers throws around a lot of inertia calculations in terms of "pounds per square inch" (lbs/in2) for various rigs, and antler setups.(p.254-5 in first edition) e.g. The 6ft super antlers (approx 8 inches above the camera) increased roll inertia by nearly 7,000 lb/in2 Could someone clarify what distances you need to measure (heights or radii?) and the formula for calculating inertia in multiple axes? I am guessing this is a complicated spreadsheet requiring lots of rig inputs, and it may have been generated somewhere in the deep dim past. I attempted to map some of the variables in the attached photo but it obviously becomes "Dynamic Balance formula on steroids" And a supplementary question: ... the inertia measurements look enormous and seem very abstract. Do they actually relate in a meaningful ratio to the measure of actual pressure being applied by the fingers on the post? Such actual numbers are a academic when doing mods in the field, where it all comes down to "feel" and "rules of thumb", but this an aspect of steadicam theory that has not had a lot of coverage, so I am just putting the question out there.

-
This thread is getting more "theoretical" ! ... A bit like Alice down the rabbit hole. I have had correspondence with the scientific researcher who developed the "gaze tracking" software featured in the above video essay .. Dr Tim J Smith, Lecturer in the Department of Psychological Sciences, University of London. He has a blog called "CONTINUITY BOY: Empirical Investigation of Film Perception" which, among other things, refers to a scientific study carried out on audience attention/perception of long sequences in Russian Ark and Children of Men and edited version thereof. Amazing to know people are doing such research. Can you measure the "good brain massage" of a Steadicam shot on an EEG? Dr Smith reckons there is scope for this gaze tracking software to be used by the film industry to enhance its current "archaic test-screening model of audience analysis". Also, with the creative frontier of 48 fps 3D, I think there has got to be some clever applications of this technology lurking out there with the Jim Camerons and Peter Jacksons of this world. If we could prove scientifically to the movie moguls of this world that audiences love good long Steadicam shots (at a cellular level!) maybe we could see a box-office renaissance ... away from the staccato editing scourge of modern times ... and instead see armies of long-take Steadicam artists sent forth anew into the world to ply their art. ....... Am I dreamin????